Musketeers: Autonomous pickup and delivery fleet
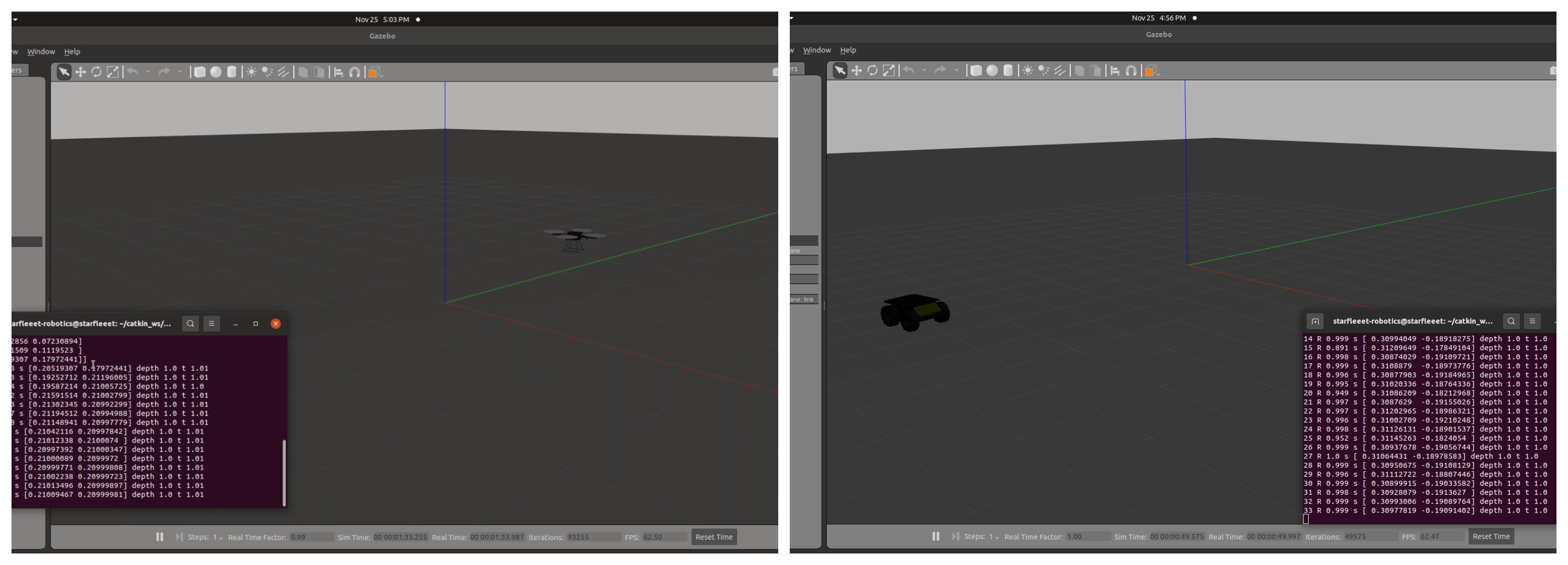
 In this project, we develop a multi-robot(20) autonomous delivery framework, that works with husky robots from
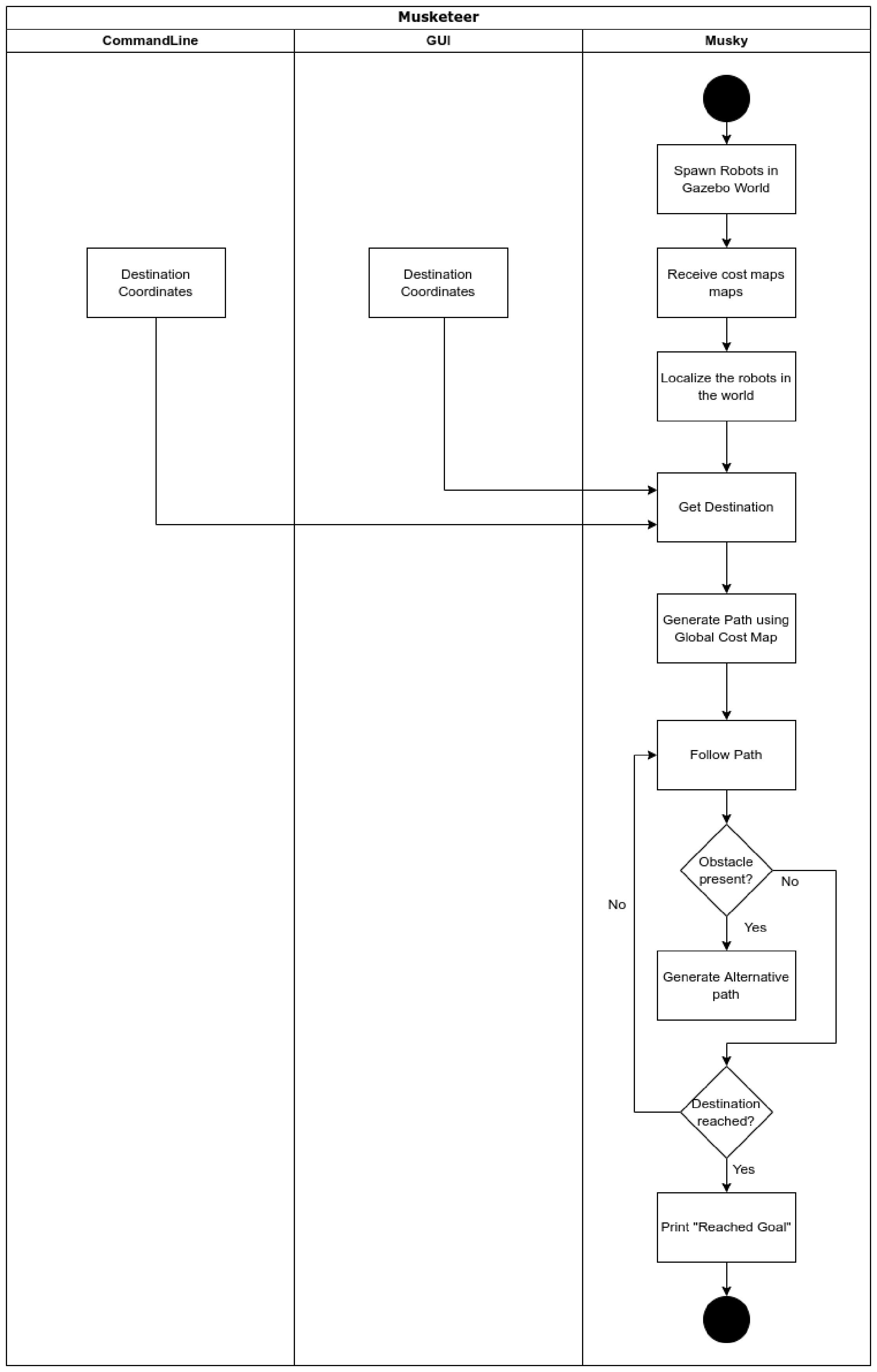
ClearPath robotics, in a simulation environment. The robots called "Musky" could be access delivery and pickup locations via command line inputs and/or with a Graphical User Interface (GUI) , where they can be made to traverse
to a preset location to pick up an order from a restaurant and will deliver it to a preset delivery location. Our proposed Robotic delivery system consists of a fleet of husky robots parked at multiple base stations, Where
each base station is provided with a unique Base ID. The purpose of each station is to charge robots and act as a fulfillment center to process the order. Upon receiving the orders from customers, Our advanced Task Planner
algorithms take care of assigning delivery jobs to available Musketeers with sufficient charge to fulfill the order. Upon fulfillment of the order to the destination, The robot’s destination location becomes the new source
location to process the new order. These operations are further continued and planned according to the task planner. We utilised ROS "move_base" framework for the navigation of the Musketeers to reach destination location.We
have used ROS "gmapping" package to create the local and global cost maps along with detecting obstacles. We developed multiple interfaces in order to interact with the user using kivy for creating the GUI and CLI for command
line input. This project is being developed using agile methodologies and test driven development. For more information about this project can be accessed at the github repository.
In this project, we develop a multi-robot(20) autonomous delivery framework, that works with husky robots from
ClearPath robotics, in a simulation environment. The robots called "Musky" could be access delivery and pickup locations via command line inputs and/or with a Graphical User Interface (GUI) , where they can be made to traverse
to a preset location to pick up an order from a restaurant and will deliver it to a preset delivery location. Our proposed Robotic delivery system consists of a fleet of husky robots parked at multiple base stations, Where
each base station is provided with a unique Base ID. The purpose of each station is to charge robots and act as a fulfillment center to process the order. Upon receiving the orders from customers, Our advanced Task Planner
algorithms take care of assigning delivery jobs to available Musketeers with sufficient charge to fulfill the order. Upon fulfillment of the order to the destination, The robot’s destination location becomes the new source
location to process the new order. These operations are further continued and planned according to the task planner. We utilised ROS "move_base" framework for the navigation of the Musketeers to reach destination location.We
have used ROS "gmapping" package to create the local and global cost maps along with detecting obstacles. We developed multiple interfaces in order to interact with the user using kivy for creating the GUI and CLI for command
line input. This project is being developed using agile methodologies and test driven development. For more information about this project can be accessed at the github repository.
References:
Musketeers: Autonomous pickup and delivery fleet [
pdf] [
ppt][
github]
Rahul Karanam, Sumedh Koppuala,Pratik Acharya
ENPM808X 2021

.png)
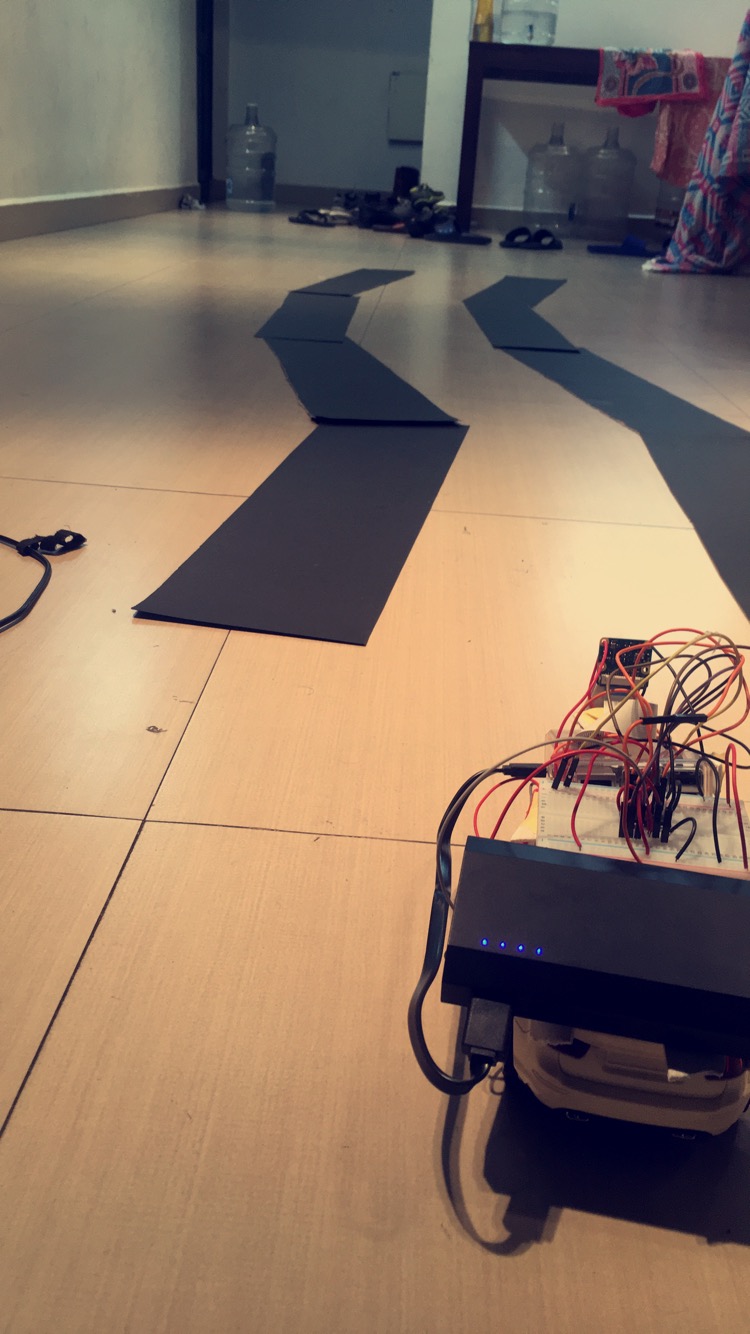 A scaled down version of a self-driving car is being built using neural networks. • This system uses l293d for controlling
the motors, Pi camera for taking photos and providing inputs to the neural network. • Trained the model using a supervised learning algorithm to learn the optimized steering angle with two hidden layers. • Ultrasonic sensors
are used for obstacle avoidance; Raspberry pi is used as a server to take the inputs and predict the outcome after training through a neural network. • We use Opencv to optimize the weights by backpropagating the gradients.
Once we get the optimized weights, we can apply it to the model then the car can run autonomously.
A scaled down version of a self-driving car is being built using neural networks. • This system uses l293d for controlling
the motors, Pi camera for taking photos and providing inputs to the neural network. • Trained the model using a supervised learning algorithm to learn the optimized steering angle with two hidden layers. • Ultrasonic sensors
are used for obstacle avoidance; Raspberry pi is used as a server to take the inputs and predict the outcome after training through a neural network. • We use Opencv to optimize the weights by backpropagating the gradients.
Once we get the optimized weights, we can apply it to the model then the car can run autonomously.

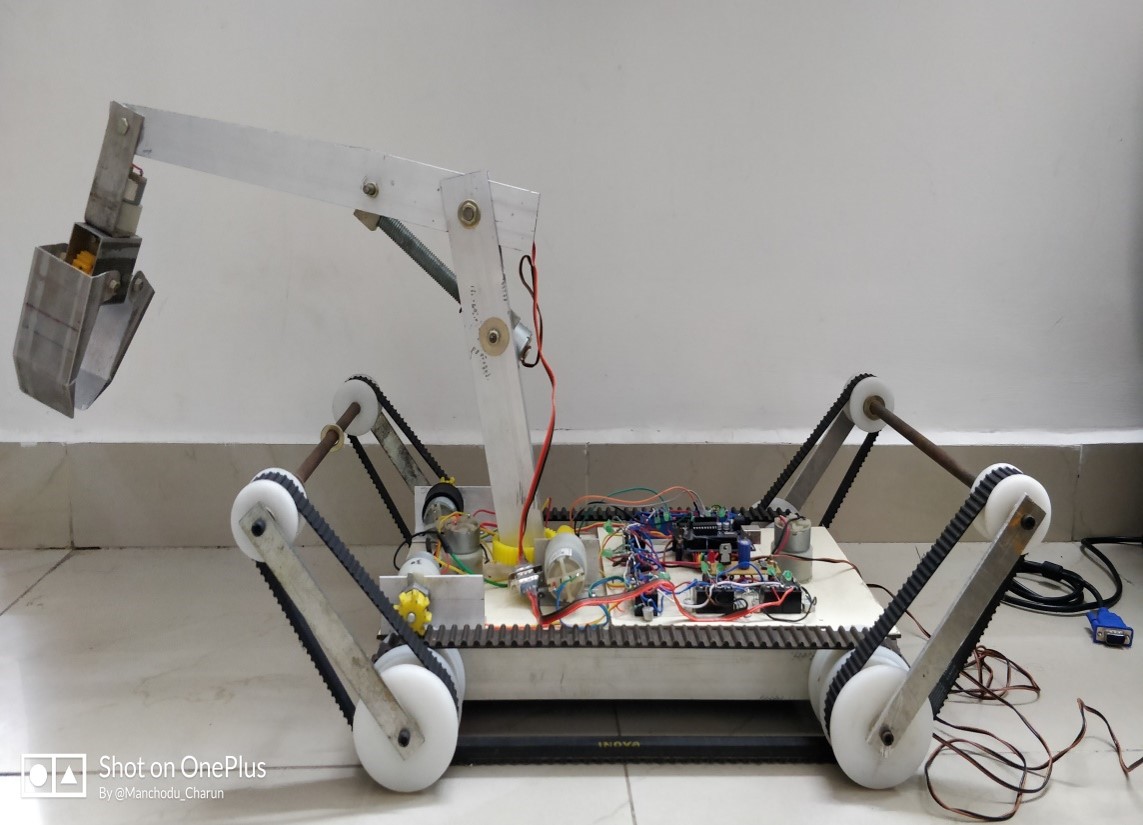
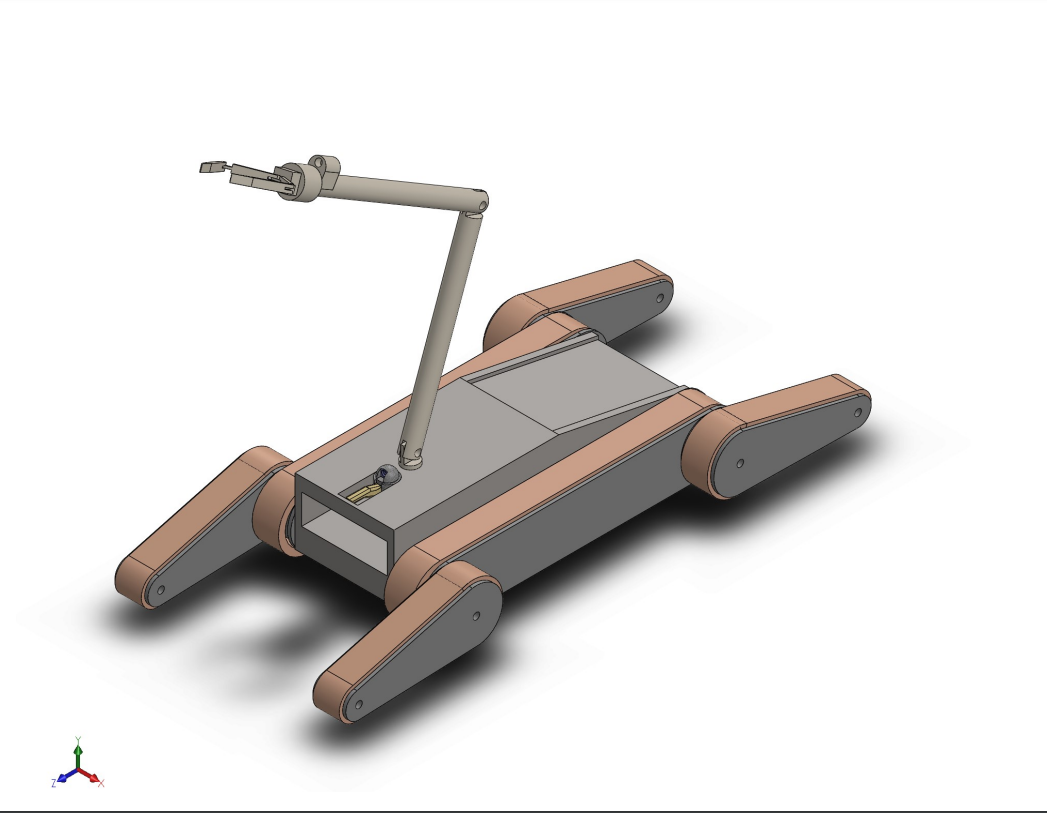 A four-articulated legged UGV with 3 DOF Pan tilt camera used for surveillance in a remote area. The Vehicle has four articulated
legs which can operate on any terrain, can climb stairs and a 3 DOF Pan tilt camera used for visual support and can carry payload using the robotic arm from a shorter distance. It is controlled through a wireless joystick which
is attached with an in-built display for visual scope. The Project can be further developed by collaborating with drones for vision and path guidance to access inaccessible terrain and environments.
A four-articulated legged UGV with 3 DOF Pan tilt camera used for surveillance in a remote area. The Vehicle has four articulated
legs which can operate on any terrain, can climb stairs and a 3 DOF Pan tilt camera used for visual support and can carry payload using the robotic arm from a shorter distance. It is controlled through a wireless joystick which
is attached with an in-built display for visual scope. The Project can be further developed by collaborating with drones for vision and path guidance to access inaccessible terrain and environments.
{kind=link}